计组笔记_chapter3
3.1 存储器概述
- 易失性半导体存储器统称为RAM
- 静态RAM(SRAM)
- 动态RAM(DRAM)
- 非易失性的半导体存储器统称为ROM
- 掩膜ROM(MASK ROM):出厂的时候就写好了,不能改了捏
- 可编程ROM(PROM)
- 一次性可编程ROM(OTP ROM)
- 可擦除PROM(EPROM)
- 紫外线擦除EPROM(UV EPROM)
- 电擦除EPROM(EEPROM,E2PROM)
- 闪速存储器(FLASH ROM)
- 存储器的目标
- 大容量
- 高速度
- 低价格
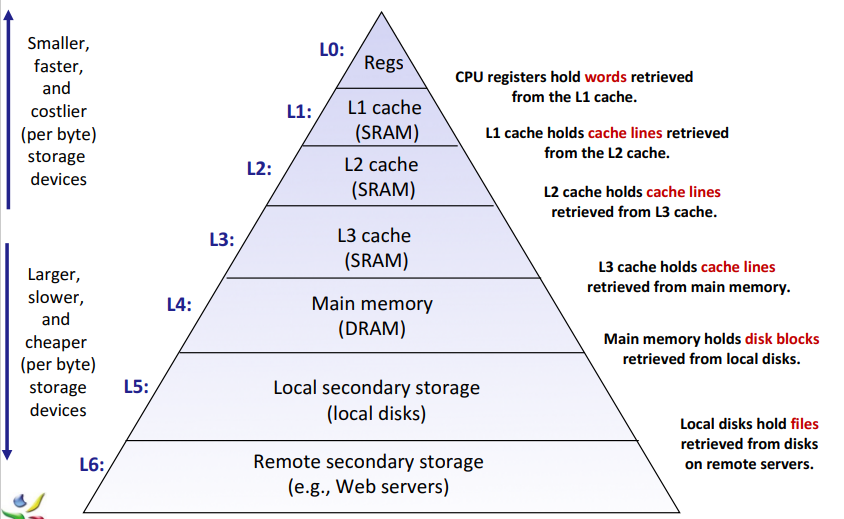
- 现代计算机的层次存储器系统
- Register
- On-Chip Cache
- Second Level Cache(SRAM)
- Main Memory(DRAM)
- Secondary Storage(Disk)
- Tertiary Stroage(Disk)
其中,内存=Cache+主存
内存的主要技术指标
- 访问时间TA:
从存储器接收到读写命令道信息被读出或写入完成所需的时间,取决于存储介质的物理特性和寻址部件的结构 - 存取周期TM:
在存储器连续读写过程中一次完整的存取操作所需的时间(CPU连续两次访问存储器的最小时间间隔) - 功耗
- 可靠性
主存储器的读写过程
- 读过程:
- 给出地址
- 给出片选与读命令
- 保存读出内容
- 写过程:
- 给出地址
- 给出片选与数据
- 给出写命令
3.2 随机读写存储器
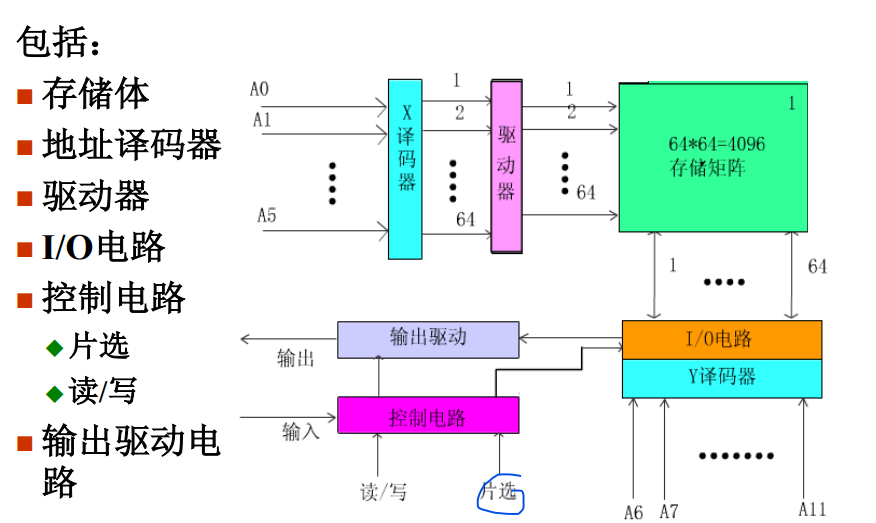
存储器芯片的基本结构
- 地址线
- 数据线(双向)
- 片选信号
- 读写控制线
n位存储器芯片的结构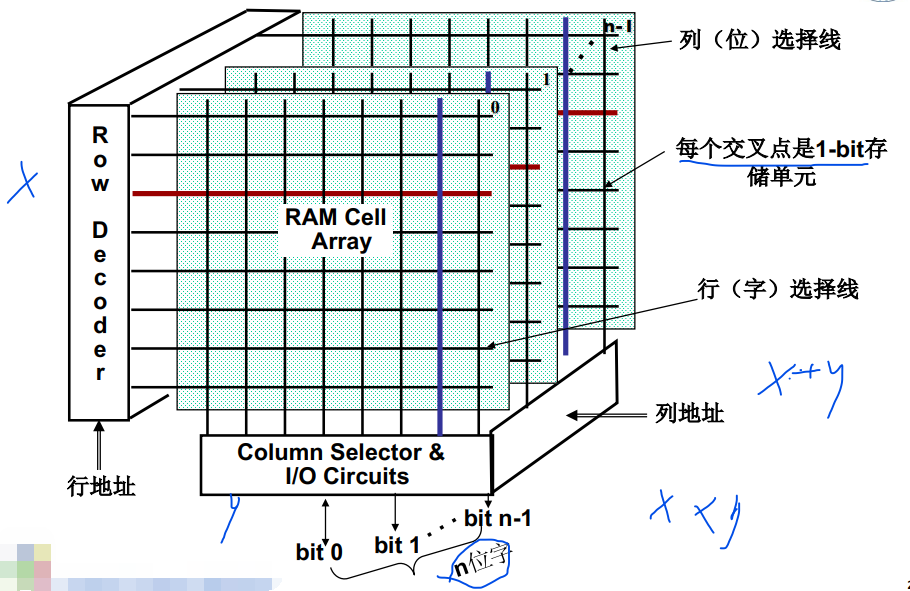
SRAM基本电路
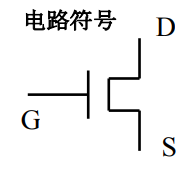
关于MOS管:
当G极电压大于导通电压时,DS导通,G极仅有电压而无电流。
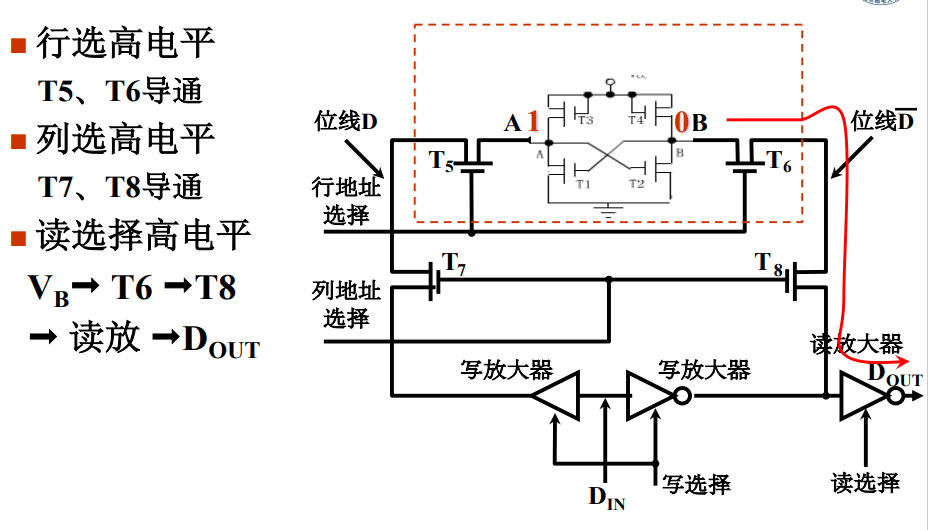
SRAM读操作
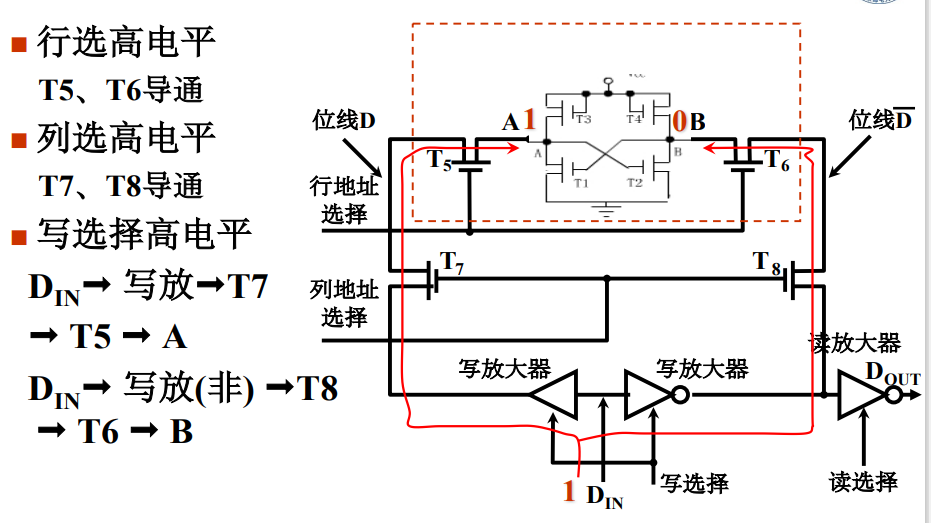
SRAM写操作
SRAM存储器的结构
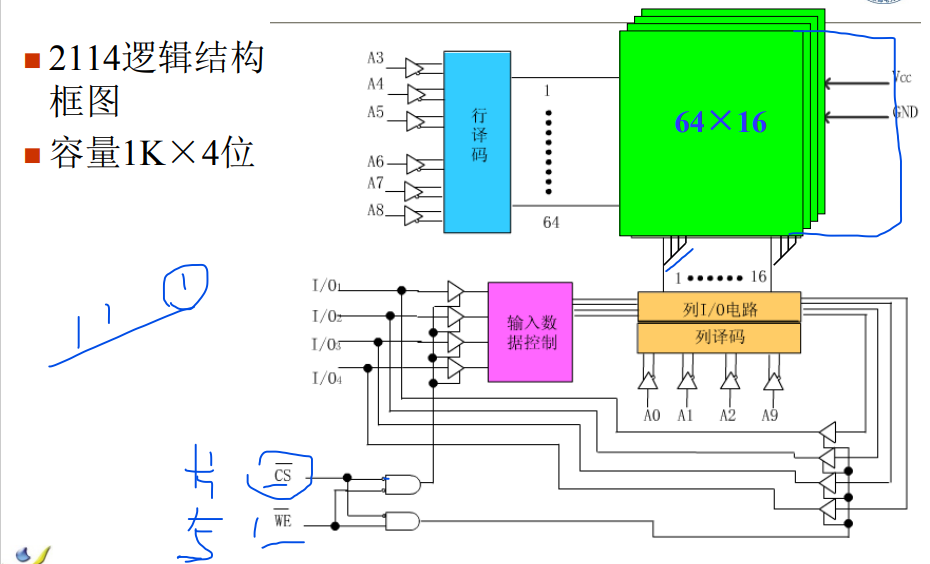
SRAM实例
字扩展&位扩展
这位老哥讲的不错,能看懂,就是容易记不住。
动态存储器DRAM
可以减少晶体管的数目,但是存储的电荷会泄露,所以需要动态刷新电路。
四管动态存储单元
DRAM刷新是对一行进行刷新的。
单管动态存储单元
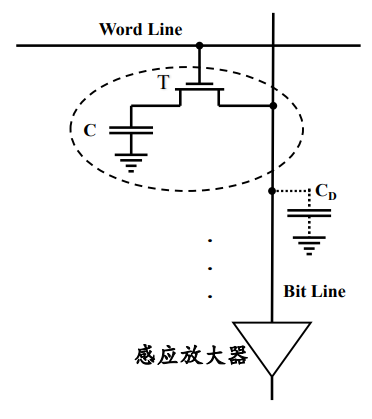
word line是字线,bit line是数据线
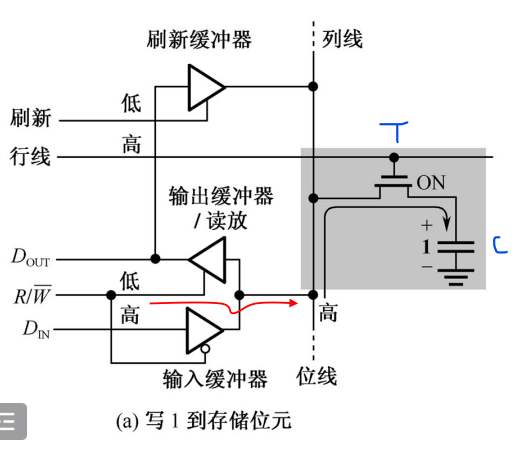
DRAM写操作
- 字线高电平,T导通
- 写1: 数据线为高电平,通过T对C充电
- 写0: 数据线为低电平,C通过T放电
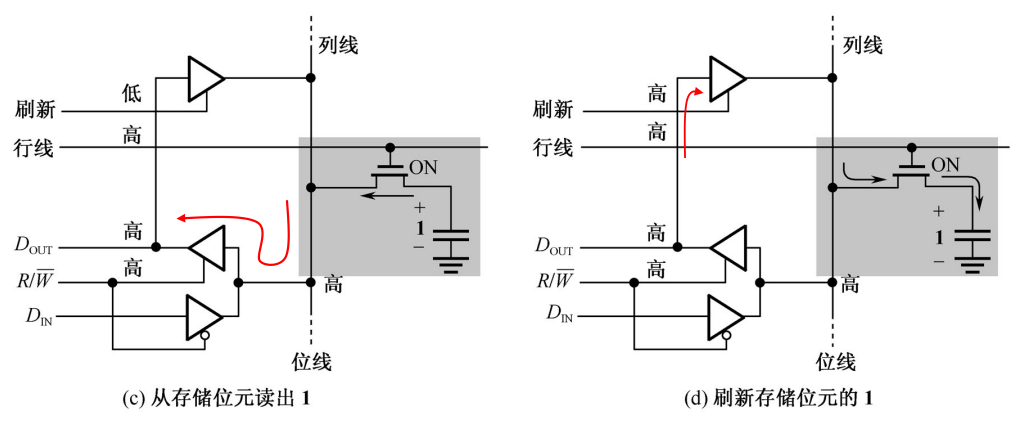
DRAM读操作&刷新操作
- 数据线预充电至VDD/2
- 当字线为高电平,T导通,若原来C充有电荷,则C放电使数据线电位小幅上升,经放大后读出为1;若原来C上无电荷,则C充电使数据线电位小幅下降,经放大器后读出为0。
- 单管DRAM单元的读出是破坏性的,在读出信息后要立即对单元进行“回写”,以恢复原信息。
DRAM和SRAM的比较
- DRAM
- 主存
- 电容+1晶体管
- 需要刷新(2~8ms)
- 读操作是破坏性的
- 密度高
- 地址线分时复用:管脚是稀缺资源,通常是行地址和列地址进行分时复用
- SRAM
- Cache
- 速度比DRAM快
DRAM读时序
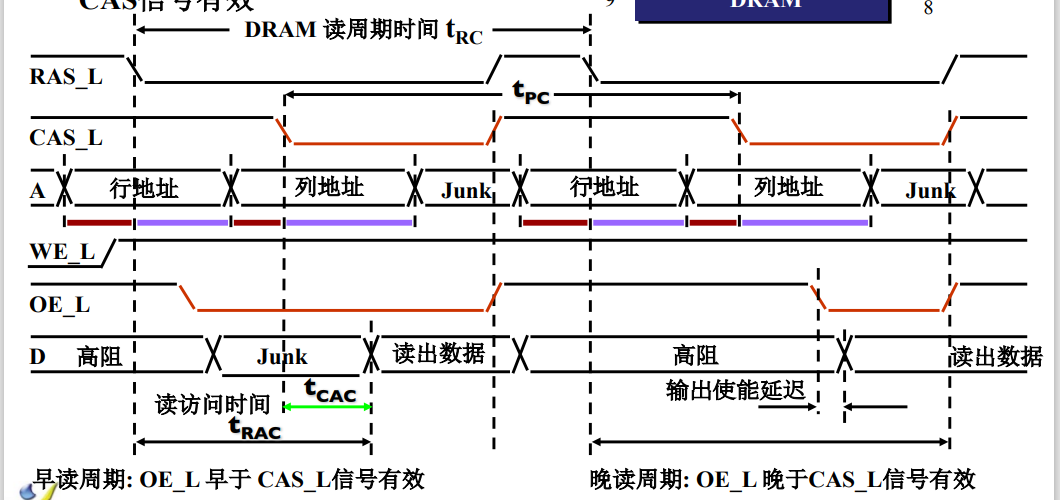
OE_L是输出使能信号,WE_L是写使能信号,RAS_L是row 行地址有效,CAS_L是column 列地址有效。_L代表低电平有效。
OE_L可以在CAS之前或者之后有效,区别是是否读出一些垃圾数据。
了解即可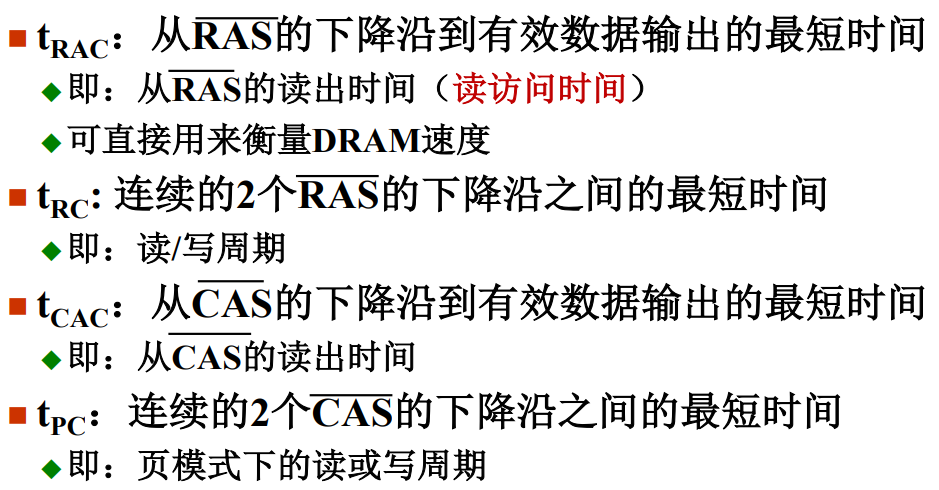
DRAM的刷新
刷新周期一般是几毫秒
集中式刷新
在整个刷新间隔里,前大半部分可以读写,后小半部分刷新。
在后小半部分里,CPU无法访问存储器,也就是不能执行指令,响应系统紧急事件。
分散式刷新
例如:某DRAM有1024行,若刷新周期为8ms,则必须在8ms内把所有1024行刷新一遍。
8000µs÷1024≈7.8µs,即每隔7.8µs刷新一行。
有点像时分复用。
需要一些相应的辅助电路,比如记录刷新到第几行了,以及一个额外的计时器etc.
两种常用的传递刷新信号的方式
- 只用RAS刷新操作
- CAS在RAS之前的刷新操作
DRAM控制器
例子
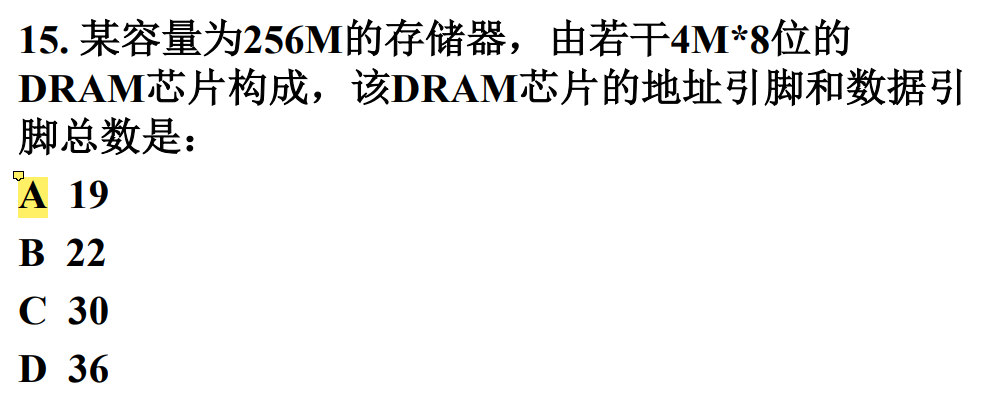
4Mx8位指的是:
一片里面有4M,有8片。
所以8位是数据位。
1M是2的20次方。
4M是2的22次方。
也就是行列线一共有22条。
因为DRAM是行列地址分时复用,所以地址线仅11条。
这里的行地址线和列地址线不一定是一样多的,但是没说的情况下默认平分。
其他的一些补充
增强型的DRAM:EDRAM(Enhanced)
由于CPU的数据经常需要访问某个地址相邻地址的数据,加一个SRAM临时存储读出的这一行,可以加快读取速度。
在行地址不变的情况下,连续的变换列地址,称为Brust Mode,这种情况下的增强型DRAM读取速度尤其快。SDRAM:同步DRAM
S:synchronous a.同步的
添加了一个时钟信号,让CPU和读写存储变成了一个同步的操作。
只在时钟的上升沿进行数据的读取
为了提升速率:
DDR:在上升下降沿都进行读取。
DDR2:外部时钟的频率提高一倍,也是在上升下降沿都进行读取。CAS Latency 参数
列地址有效时候还要多久才能读取到数据,越小越好。DRAM主存读/写的正确性校验
为了提高DRAM存储器读写操作的正确性与可靠性,在写入m位数据的同时还需写入k位附加位,即写入的数据是经过纠错码编码的数据。
3.4 只读存储器和闪速存储器
只读存储器ROM
Read Only Memory
没有易失性
分类
- 掩膜ROM(MASK ROM):出厂的时候就写好了,不能改了捏
可靠性高,便宜 - 可编程ROM(PROM)
- 一次性可编程ROM(OTP ROM)
(双极型PROM,熔断型,PN结击穿型) - 可擦除PROM(EPROM)
- 紫外线擦除EPROM(UV EPROM)
- 电擦除EPROM(EEPROM,E2PROM)
- 闪速存储器(FLASH ROM)
- 一次性可编程ROM(OTP ROM)
EPROM
原理略
举例:
EEPROM
与EPROM相比,集成度低(两个晶体管存一个单位),寿命长。
闪速存储器
闪速存储器FLASH是目前唯一的具有大容量、非易失性、低价格、可在线改写和较高速度几个特性共存的存储器。
之所以称为FLASH,是因为擦除速度快,擦除整个存储矩阵所花时间,与EEPROM擦除一个存储单元的时间相同。
FLASH具有非易失性,比SRAM成本低
但是擦写次数和速度都比DRAM差不少,故不能取代DRAM
闪存分为两类:
- NOR闪存
- NAND闪存
NOR闪存
- 擦除写入时间比较长
- 有完整的地址/数据接口,能随机存取
- 存储容量比NAND小很多
NAND闪存
- 擦除写入时间比较快
- 与NOR闪存比较具有较高的密度和较低的位成本,10倍的擦除次数。
- 没有完整的地址/数据接口,I/O接口只允许顺序存取数据
闪存特点:
可在线写入数据,具有ROM的非易失性
可以取代全部的UV EPROM和大部分的E$^2$PRO
闪存的主要用途:
存储监控程序、引导程序等基本不变或不经常改变的程序:可使用NOR闪存
保存掉电时需要保持的系统配置等不常改变的数据:可使用NOR闪存
固态盘:采用NAND闪存
3.5 并行存储器
双端口存储器
DRRAM:dual port RAM
同一个存储器具有两组独立的控制线,地址线和数据线。
比其他的线多了一个忙线(busy line),作用是解决读写冲突。
实例:
IDT7133
容量为2K×16位SRAM
功能方框图
当两个端口同时存取存储器同一存储单元时,便发生读写
冲突,为了解决读写冲突,设置了BUSY标志线
- 由判断逻辑部件来决定对哪个端口优先进行读写操作,另
一个端口的BUSY标志有效,读写操作延迟执行。 - 判断逻辑部件的判断方式:
- CE判断:如果地址匹配且在CE之前有效,片上的控制逻辑在CEL和CER之间进行判断来选择端口
- 地址有效判断:如果CE在地址匹配之前变低,片上的控制逻辑在左、右地址间进行判断来选择端口
多模块交叉存储器
各模块地址安排有2种方式
- 顺序方式
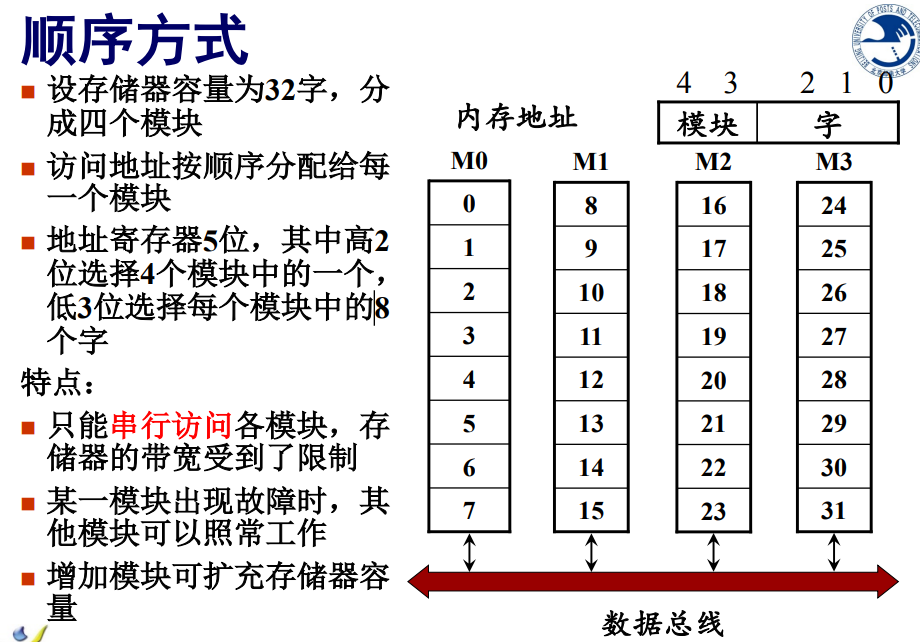
- 交叉方式(Interleaving)也称为多通道方式
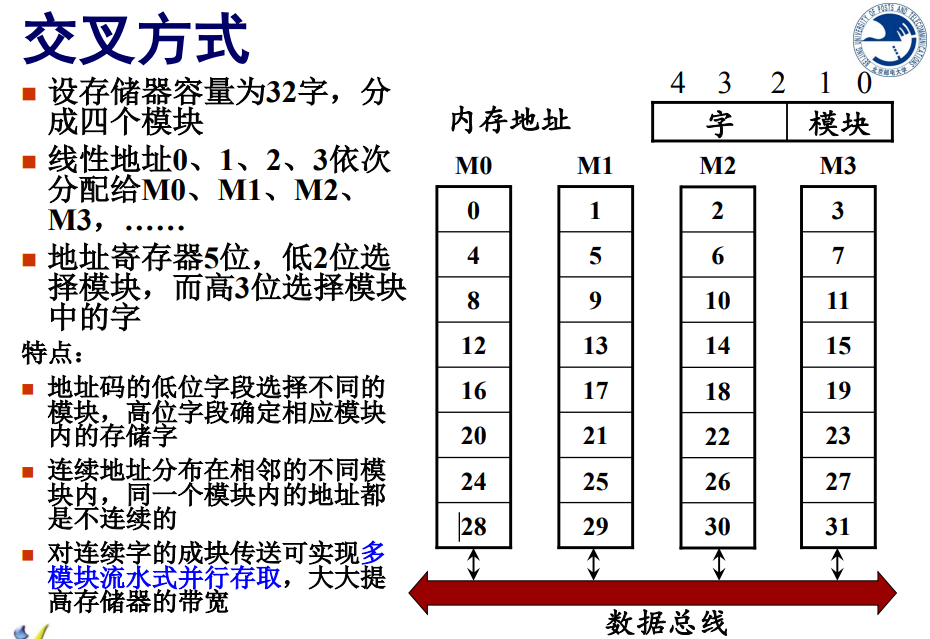
主存被分成4个独立、容量相同的模块M0/M1/ M2/M3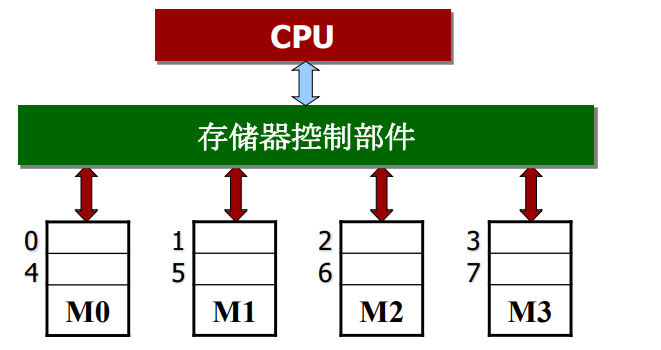
- 每个模块均有自己的读写控制电路、地址寄存器和数据寄存器,
以相同的方式与CPU传送信息 - CPU同时访问四个模块,由存储器控制部件控制它们分时使用
数据总线进行信息的传递(读取T相对于数据传递$\tau$要慢很多
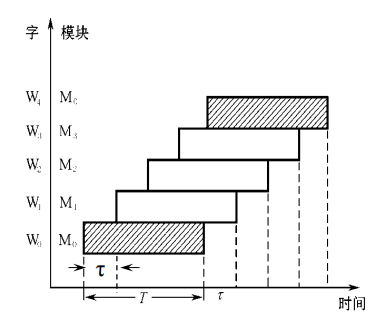
假设模块字长等于数据总线宽度,且模块存取一个字的存储周期为T,总线传送周期为τ,存储器的交叉模块数为m
那么,m=T/τ被为交叉存取度,连续读取m个字所需的时间为t1=T+(m-1)τ
对于顺序方式存储器,连续读取m个字所需的时间为t2=mT
例子:
解答: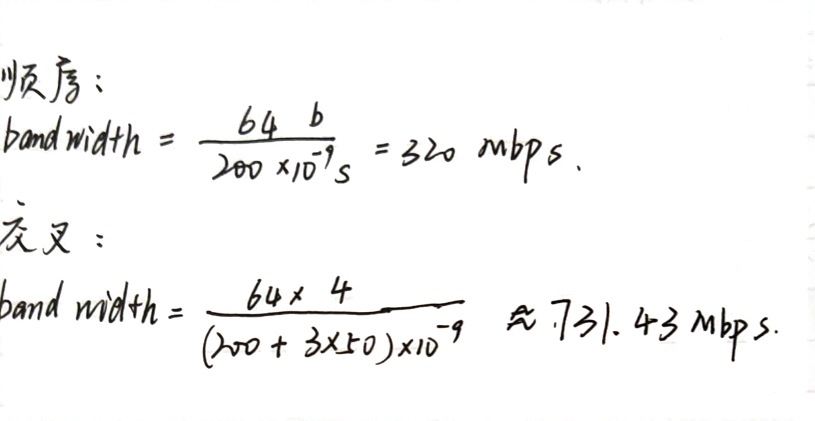
零等待存取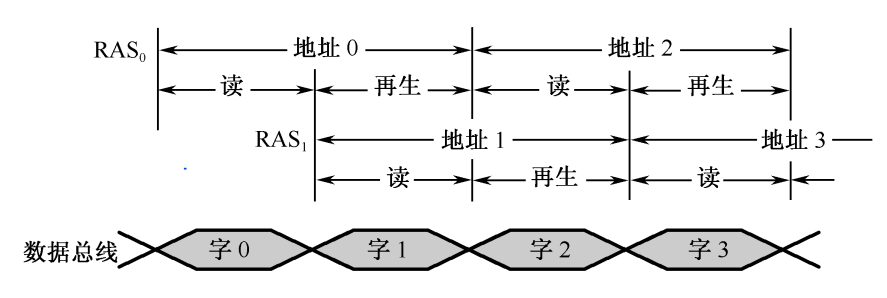
3.6 Cache存储器
局部性原理
principle of locality,讨论的就是双重for循环取二维数组那个,执行速度的问题。
- 时间局部性 temporal locality
在一个具有良好时间局部性的程序中,被引用过一次的内存位置很可能在不远的将来再被多次引用 - 空间局部性 spatial locality
在一个具有良好空间局部性的程序中,如果一个内存位置被引用了一次,那么程序很可能在近期引用附近的一个内存位置
存储系统的层次结构
高速缓存Cache/kæʃ/
Cache是一个小而快速的存储设备,它作为存储在更大、也更慢的设备中的数据对象的缓存区域
- Cache通常采用高速SRAM来实现
- 利用局部性原理,在Cache中完成大多数访问,从而缩短平均访问时间
- CPU和主存之间的速度差很大通常采用两级或多级Cache系统
- 全由硬件调度,对用户透明
不同层次之间Cache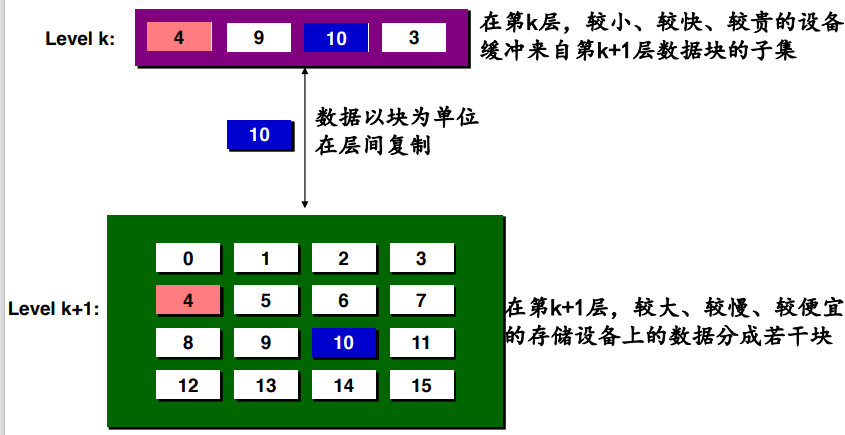
Cache 命中与缺失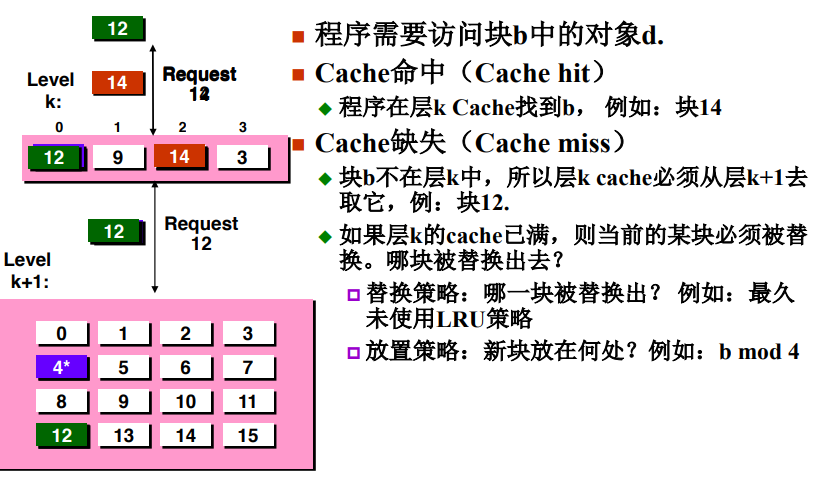
LRU :Least Recently Used最近最少使用
Cache缺失类型
- 冷启缺失/义务缺失(Cold miss or Compulsory miss)
- 当cache为空时就产生冷启缺失,比如刚开机
- 冲突缺失(Conflict miss)
- 层k+1的数据块通常只能映射到层k的有限位置上。尽管层k中cache足够大,但层k+1有多个数据块全都映射到层k的同一位置上,则产生冲突缺失
- 容量缺失(Capacity miss)
- 当活动的cache块的数量超过cache的容量就产生容量缺失
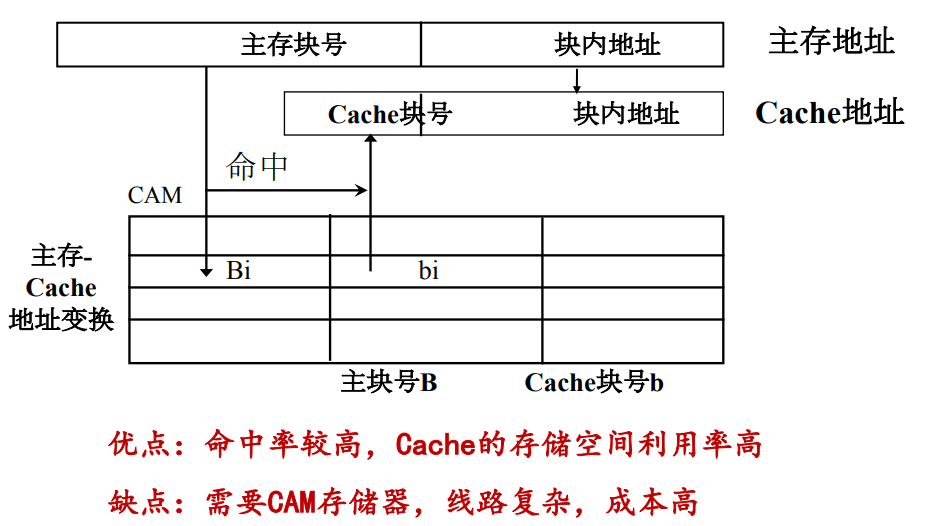
内容可寻址CAM
(Content Addressable Memory)是一种用内容进行寻址的存储器。将一个输入数据项与存储的所有数据项同时进行比较,若存在匹配,输出该数据项对应的匹配信息(或地
址)。同时也能按地址进行读和写。
主存和Cache的分块
主存和cache间以数据块为单位进行复制,为便于管理,将主存和cache都划分为大小相等的数据块(也称行)


总的映射过程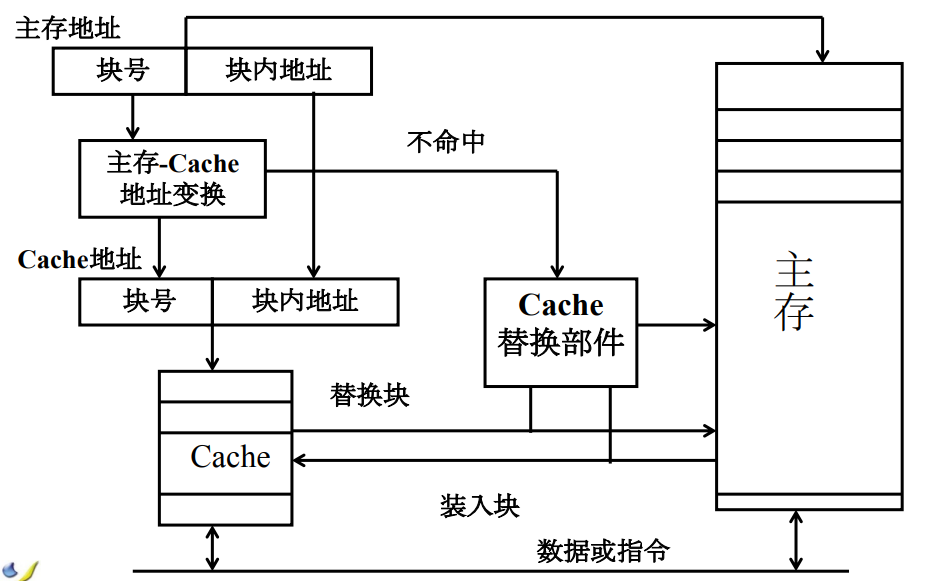
主存与Cache的地址映射
- 全相联映射( Fully Associative Mapping)
- 直接映射(Direct Mapping)
- 组相联映射(Set Associative Mapping)
全相联映射
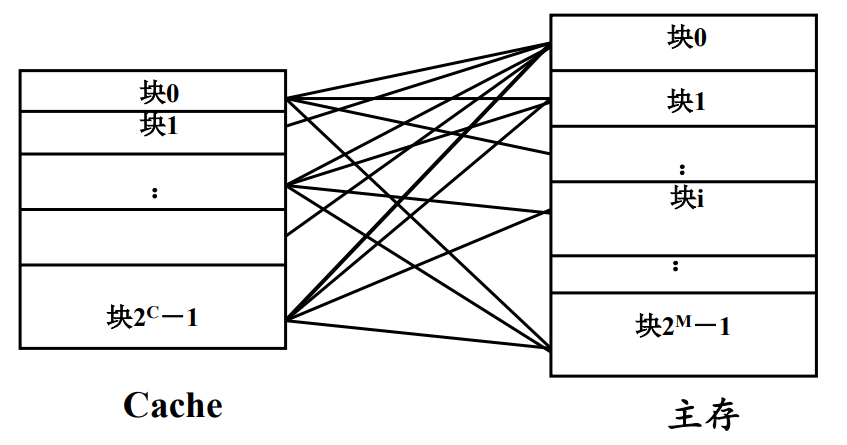
就是弄个表,其实就是前面那个内容可寻址CAM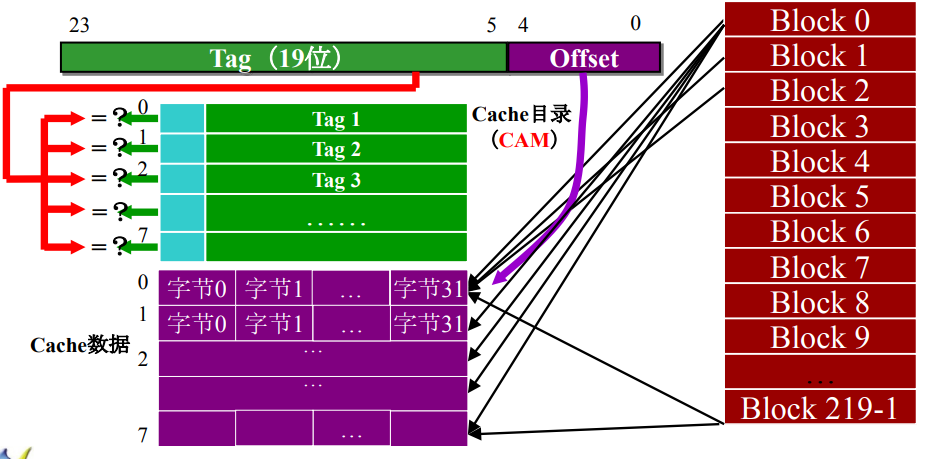
例子: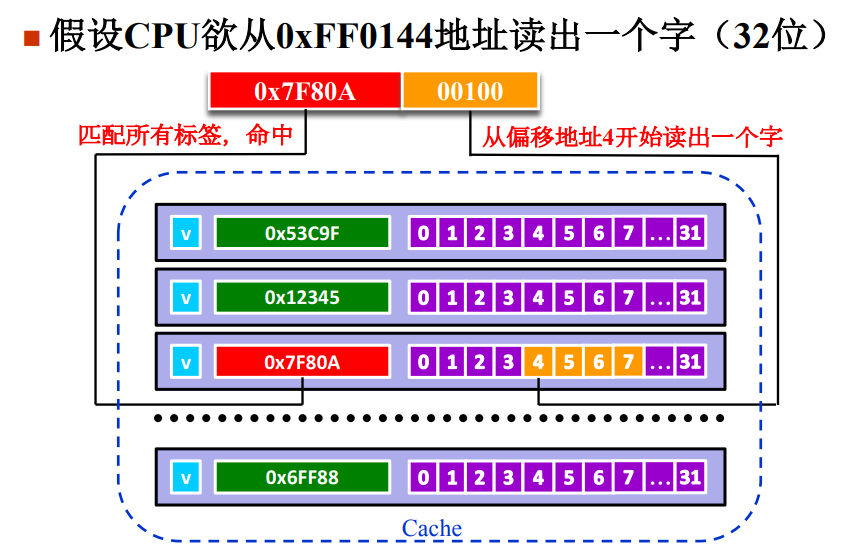
直接映射
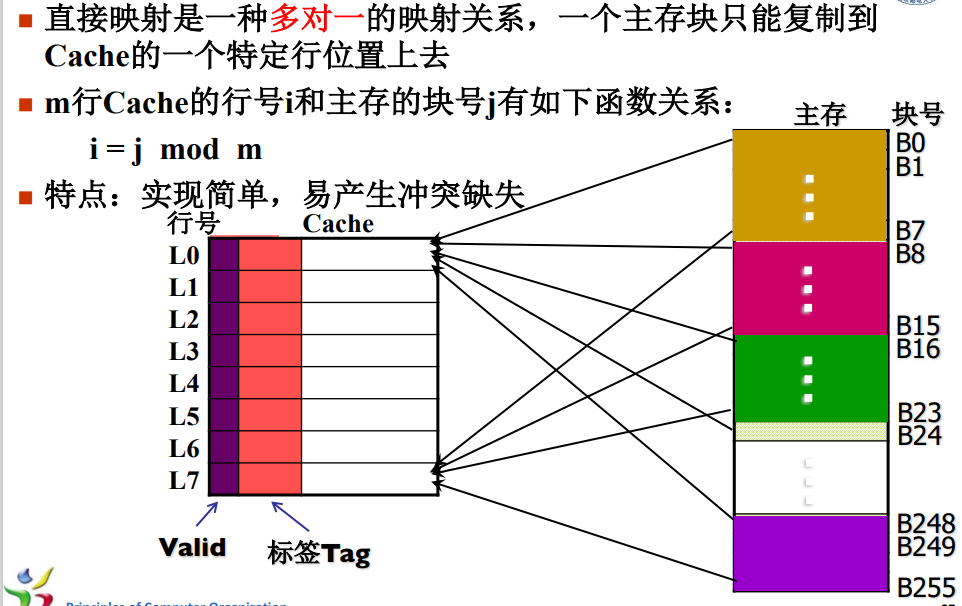
这也是能产生冲突缺失的情况
直接映射的Cache标签和行号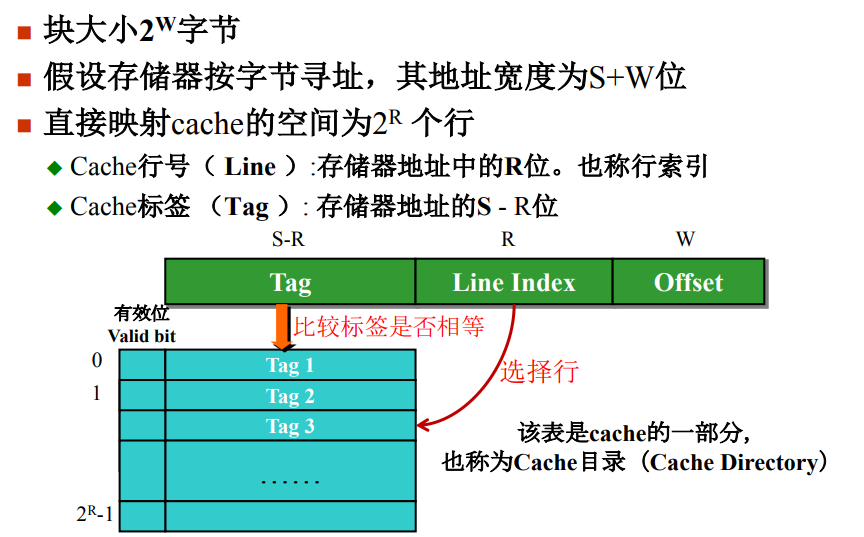
直接映射Cache的检索过程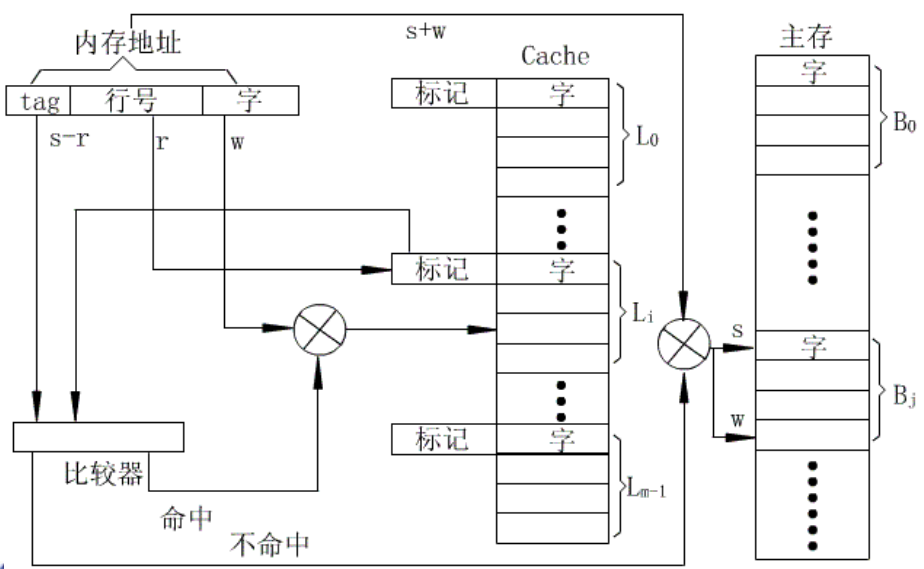
示例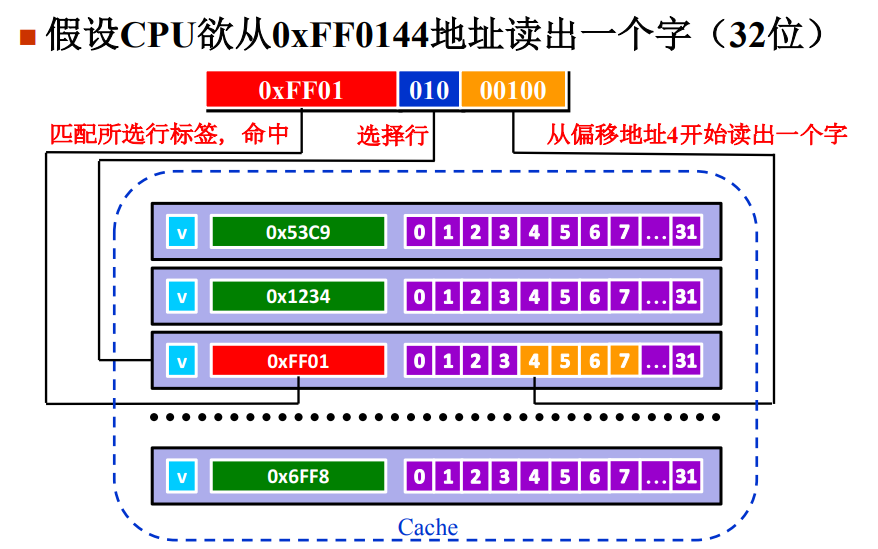
v路(v-way)组相联映射
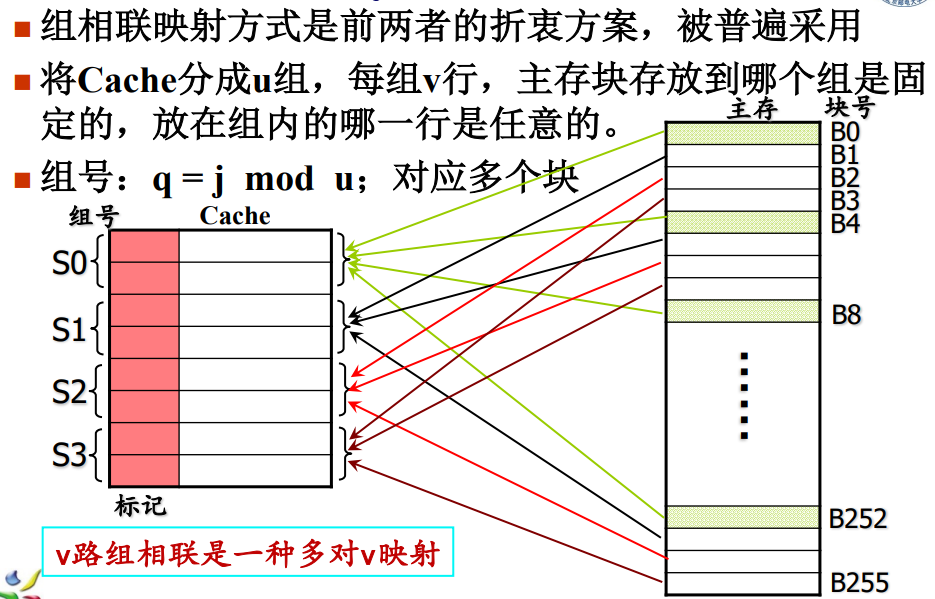
主存块存放到哪个组是固定的,放在组内的哪一行是任意的
检索过程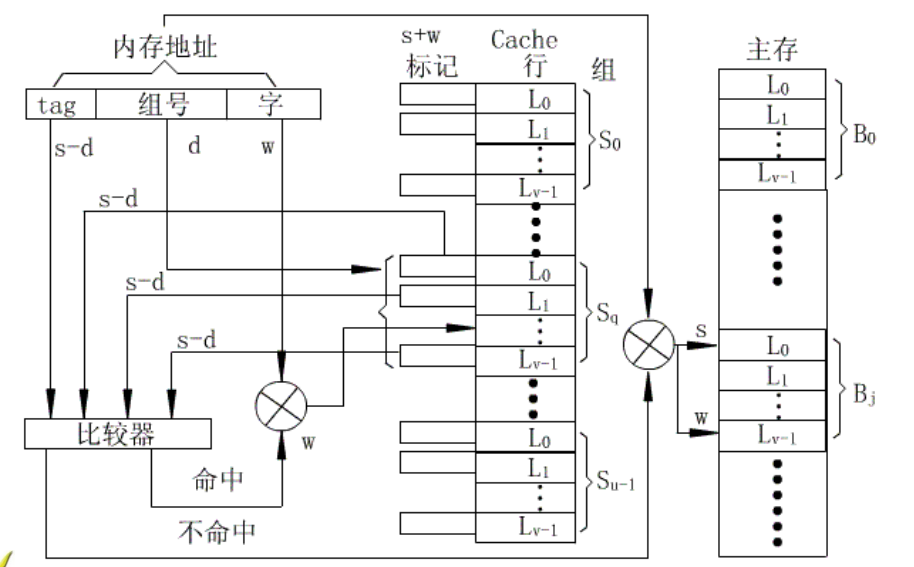
2路组相联映射示例1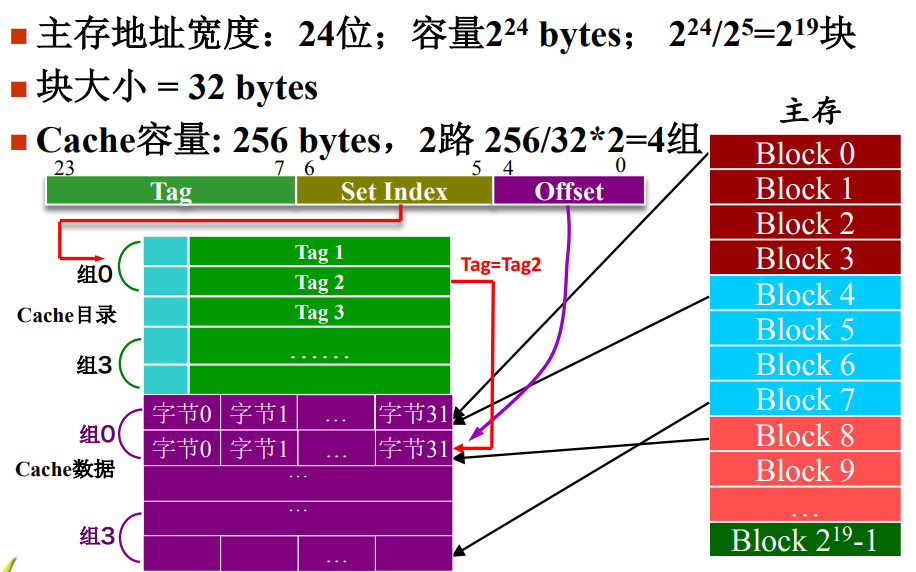
2路组相联映射示例2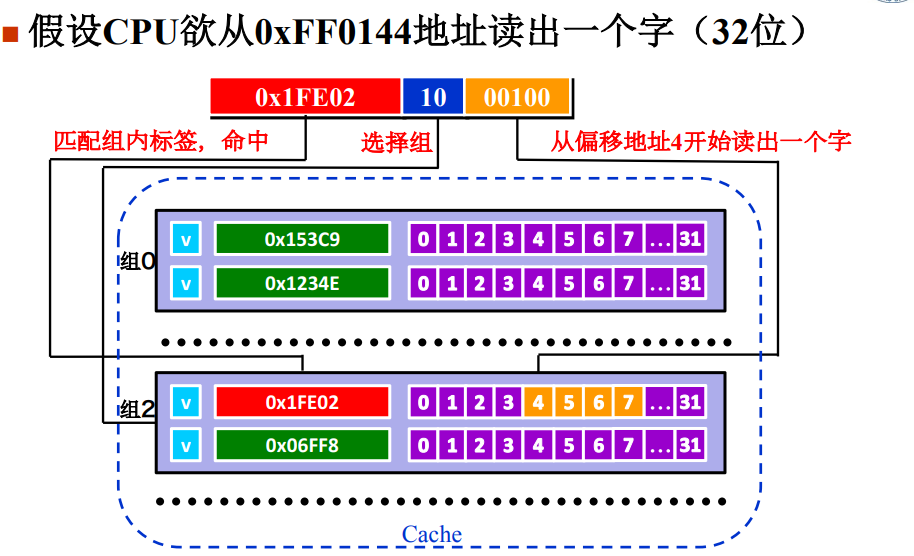
wordtable
Interleaving 交叉模式
Compulsory a.必修做的强制的
CAM 内容可寻址存储器